Arduino Smart Car Robot Kit experiment test
1. Design theme
Integrate the software and hardware knowledge learned and mastered in the course, introduce the Arduino intelligent control device made by yourself, and the practical problems solved by the project,Microbit smart car
Questions and functions.ROBOT CAR KIT
2. Basic content
Project design scheme: clearly explain the design ideas, software and hardware conditions and the feasibility of realizing the design objectives.
Hardware design: hardware function and structure overview, main module function description, hardware design circuit diagram, circuit function description
Software design: overview of software function design, program flow chart, function description of flow chart, source code of main program and program module
Debugging process: circuit construction, experimental debugging, function test and result description
Summary and Reflection: the realization degree of design task objectives, problems and solutions in the experiment, reflection and improvement
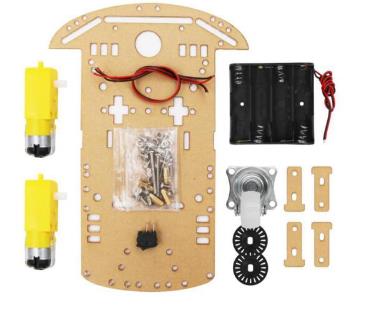
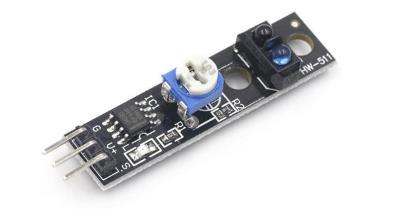
3 hardware module
It mainly includes: smart car chassis, infrared remote control sensor, PS / 3 double axle rocker, L298N double motor drive module, DC motor and electric motor
Pool group, ultrasonic sensor, infrared tracking sensor, infrared obstacle avoidance sensor, anti-collision switch